Shubh Gupta
Postdoctoral Scholar | Department of Aeronautics & Astronautics, Stanford University



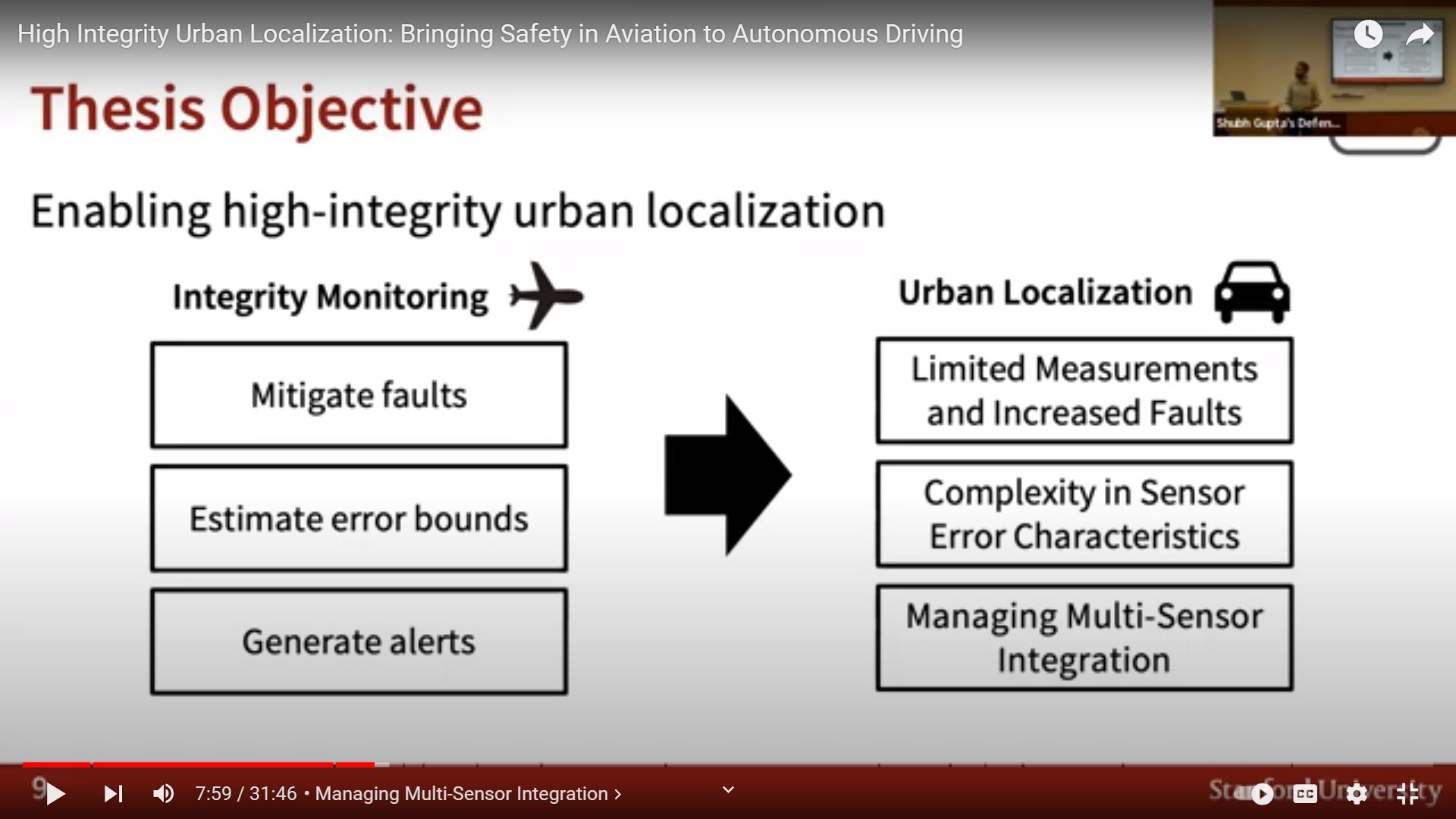
I am a Postdoctoral Scholar in the Department of Aeronautics & Astronautics at Stanford University. I am working with Professor Grace Gao in the Navigation and Autonomous Vehicles Lab (NAVLab) to develop safe and reliable systems for autonomous navigation. My research focuses on developing navigation systems that can meet stringent safety requirements through the interplay of rich environment modeling, integrity monitoring, and multi-sensor processing. I recently completed my PhD in Electrical Engineering from Stanford University, with my thesis titled "High-Integrity Urban Localization: Bringing Safety in Aviation to Autonomous Driving".
Prior to attending Stanford, I was a graduate student in the Department of Electrical and Computer Engineering at the University of Illinois (U of I) at Urbana-Champaign in the GPS Lab, where I designed robust localization algorithms for GPS pseudorange measurements.
Before my time at U of I, I was at Indian Institute of Technology (IIT) Kanpur where I earned a Bachelors of Technology in Electrical Engineering and a minor in Computer Science and Engineering. During this period, I co-led the student team for participating in the Intelligent Ground Vehicle Competition in 2017. Additionally, I was a member of the student team for participating in ABU Robocon in 2015 and 2016.
My CV is available here.